



20世紀60年代末,少數國家開始研究船舶撞橋工作。直到1983年,國際橋梁與結構工程協會LABSE首次在哥本哈根舉行了“船舶撞橋合理設計與分析研討會”,使船舶撞橋研究進入了快速發展時期。
中國對船舶碰撞問題的研究主要始于20世紀90年代。【忘平科技】發現一些專家學者結合黃石大橋、汕頭灣跨海大橋、珠海靈丁洋大橋等橋梁防撞設施的實驗研究和實踐,探索了船舶碰撞力計算和橋墩水域流場對船舶航行安全的影響。海事、航運等部門的專家也對當地水域的船舶碰撞事故及相關因素進行了統計分析。2003年,戴形宇總結了國外和國內的船舶碰撞事故,并在大量研究的基礎上建立了中國船舶碰撞事故數據庫。

結合國內外研究成果,不難看出,船舶撞橋的主要因素是人為因素。因此,制定橋區合理的通航適度和管理規定,借助現代信息技術對橋區通航船舶的航行行為進行有效的監控和指導,實時向航行船舶發布航道、水文、氣象、船舶流量分布信息,利用橋區船舶撞橋分布信息發出警報,利用高新技術合理規范和標注船舶航道,引導過橋船舶,是橋梁安全的基本保障。可見,主動防撞可以最大限度地減少或避免船舶撞橋事故。【忘平科技】結合船舶控制理論、船間水電干擾理論和視頻監控技術,使橋梁主動防船撞預警系統應運而生。
橋梁防船碰撞預警系統是一種利用高科技手段確保橋梁交通安全的創新產品,能夠快速準確地監控船舶的距離、速度和姿態信息,并立即發出警報,有效減少海上交通事故的發生。
與傳統的橋梁防撞被動設施相比,橋梁主動防船撞預警系統具有更高的智能化、自動化和準確性。采用先進的傳感器和數據處理技術,實時分析船舶的運動軌跡和狀態,預測可能發生的危險情況,通過聲光警示設備及時提醒船舶和司機注意,避免碰撞或其他事故。
該系統不僅能保證橋梁和船舶的交通安全,還能大大提高橋梁的使用壽命和維護效率,為用戶帶來可觀的經濟效益和社會價值。
下面【忘平科技】介紹一下橋梁主動防船撞預警系統硬件電路設計
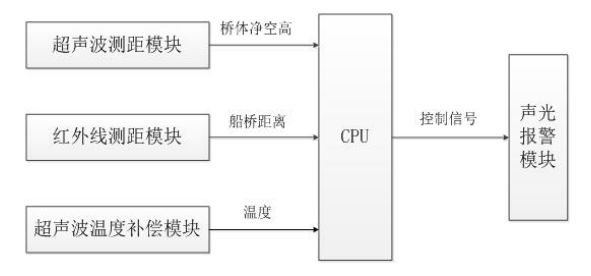
如圖所示,橋梁主動防撞報警系統包括超聲波測距模塊、紅外測距模塊、超聲波溫度補償模塊、CPU和聲光報警模塊。CPU分析比較了超聲波測距模塊測量的橋梁水面凈空高度和紅外測正模塊測量的橋梁距離,判斷船舶是否超高,并將控制信號發送給聲光報警器進行報警操作。
1、單片機控制模塊
單片機模塊是一個以芯片為核心的控制電路。它包括時鐘電路、復位電路和電源電路。單片機需要處理超聲波測距模塊和紅外測距模塊測量的數據。經過處理和分析,還需要判斷船舶是否超高,并向聲光報警模塊發送控制信號。
2、超聲波測距模塊
超聲波測距模塊負責實時監測橋梁的凈空高度,并將測量數據發送到處理器,為數據處理做準備。超聲波測距模塊有自己的溫度傳感器來校正測距結果,以避免監測過程中溫度變化對測量精度的影響。
3、紅外測距模塊
紅外測距模塊負責測量船橋之間的距離,并將測量數據發送到處理器進行處理,以獲得船舶的出水高度,為后續的數據分析做準備。紅外測距模塊精度高,抗干擾強,滿足系統測量要求。
4、聲光報警模塊
當處理器判斷船舶超高時,將控制信號發送到聲光報警器進行聲光報警。

